Transforms an image to compensate for fisheye lens distortion
undistorted = cv.fisheyeUndistortImage(distorted, K, D)
undistorted = cv.fisheyeUndistortImage(..., 'OptionName',optionValue, ...)
Input
- distorted image with fisheye lens distortion.
- K Camera matrix 3x3,
K = [fx 0 cx; 0 fy cy; 0 0 1]. - D Input vector of distortion coefficients
[k1,k2,k3,k4].
Output
- undistorted Output image with compensated fisheye lens distortion.
Options
- NewCameraMatrix Camera matrix of the distorted image. By default, it is the identity matrix but you may additionally scale and shift the result by using a different matrix.
- NewImageSize Image size after rectification
[w,h]. By default, it is set to input image size.
The function transforms an image to compensate radial and tangential lens distortion.
The function is simply a combination of cv.fisheyeInitUndistortRectifyMap
(with unity R) and cv.remap (with bilinear interpolation). See the former
function for details of the transformation being performed.
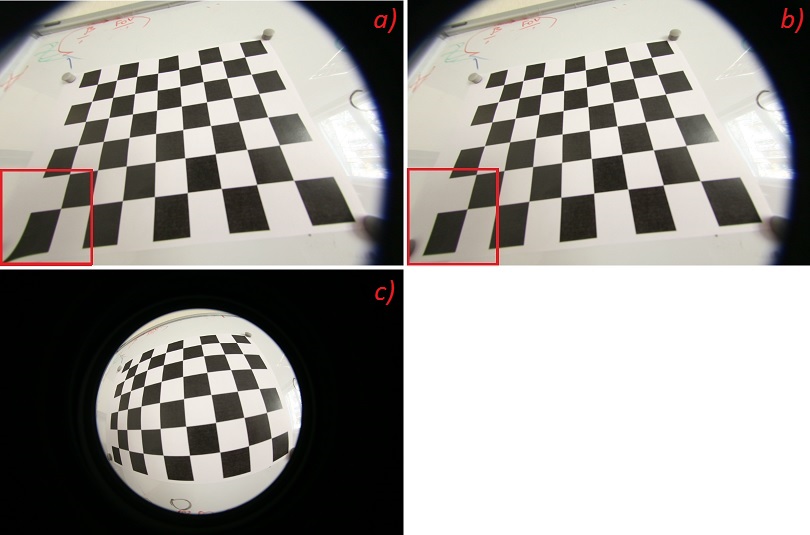
See below the results of cv.fisheyeUndistortImage:
- a) result of cv.undistort of perspective camera model (all possible
coefficients
[k1, k2, k3, k4, k5, k6]of distortion were optimized under calibration) - b) result of cv.fisheyeUndistortImage of fisheye camera model (all
possible coefficients
[k1, k2, k3, k4]of fisheye distortion were optimized under calibration) - c) original image was captured with fisheye lens
Pictures a) and b) almost the same. But if we consider points of image located far from the center of image, we can notice that on image a) these points are distorted.